优先队列101
优先队列101
优先队列是堆这种数据结构的重要应用之一,甚至大多数语意下它俩指的就是同一个东西。但某些特殊情况下,STL自带的优先队列priority_queue并不能完全满足需求,比如查找/修改队列中的某个元素的优先级。本文介绍三种不同形式的优先队列,对处理这些特殊情况会有效果。
By the way...
要清晰地区分容器和容器适配器两个概念。容器适配器是对容器的上层封装,比如stack、queue都是由vector/deque适配实现。但容器适配器为了维护自己的数据结构特性,会阉割容器的部分原生接口,比如封闭一端的出入口、不支持随机访问、不提供迭代器遍历等。但少数情况下,我们确实需要“不完全符合规范”的数据结构。
# 写在前面……
本文将使用三种形式的优先队列实现堆优化版本的Dijkstra算法,数据结构定义如下:
#define INF 0x3f3f3f3f
#include <iostream>
#include <vector>
#include <queue>
#include <set>
#include <functional>
using std::vector;
using std::cout;
using std::endl;
struct Vertex { // 节点
int id;
int dist; // 距起点的距离
Vertex() : id(-1), dist(INF) {}
Vertex(int i, int d) : id(i), dist(d) {}
bool operator<(const Vertex& rhs) const {
if (dist == rhs.dist) return id < rhs.id;
return dist < rhs.dist;
}
};
struct Edge { // 边
int sid;
int tid;
int w;
Edge(int s, int t, int w) : sid(s), tid(t), w(w) {}
};
using AdjList = vector<vector<Edge>>;
class Graph {
public:
Graph(int v) : v_num(v), dist(v_num, INF), adj(v_num) {}
void add_edge(int s, int t, int w) { adj[s].emplace_back(s, t, w); }
void dijkstraWithSTLQueue(int s, int t);
void dijkstraWithSTLSet(int s, int t);
void dijkstraWithCusQueue(int s, int t);
void print_path(int s, int t, vector<int>& predecessor) {
if (s == t) {
cout << s;
return;
}
print_path(s, predecessor[t], predecessor);
cout << "->" << t;
}
void print_dist(int s, int t, vector<int>& dist) {
cout << endl << s << "->" << t << ": " << dist[t] << endl;
}
private:
int v_num;
vector<int> dist; // 距起点的最短路径
AdjList adj;
};
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
# 1. priority_queue
STL中的priority_queue也是一种容器适配器,可以适配vector/deque,基于堆化操作make_heap实现。由于默认是大顶堆(优先级大的先出队),因此我们需要自定义比较函数,使最短路径先出队。
std::function<bool(const Vertex&, const Vertex&)> comp1 = [](const Vertex& lhs, const Vertex& rhs) {
if (lhs.dist == rhs.dist) return lhs.id > rhs.id;
return lhs.dist > rhs.dist; // STL priority_queue 默认大顶堆,需要传入自定义比较函数
};
using PriorityQueue1 = std::priority_queue<Vertex, std::vector<Vertex>, decltype(comp1)>;
2
3
4
5
算法实现
void dijkstraWithSTLQueue(int s, int t) {
vector<int> predecessor(v_num);
dist.clear();
dist.resize(v_num, INF);
dist[s] = 0;
PriorityQueue1 q(comp1); // 小顶堆
q.emplace(s, 0);
while (!q.empty()) {
auto curr = q.top();
q.pop();
if (curr.id == t) { break; } // 最短路径!
for (auto& e : adj[curr.id]) {
if (curr.dist + e.w < dist[e.tid]) {
predecessor[e.tid] = curr.id; // 记录前驱节点
dist[e.tid] = curr.dist + e.w;
q.emplace(e.tid, dist[e.tid]);
}
}
}
print_path(s, t, predecessor);
print_dist(s, t, dist);
cout << "priority_queue队列中剩余元素: " << q.size() << endl;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
算法分析
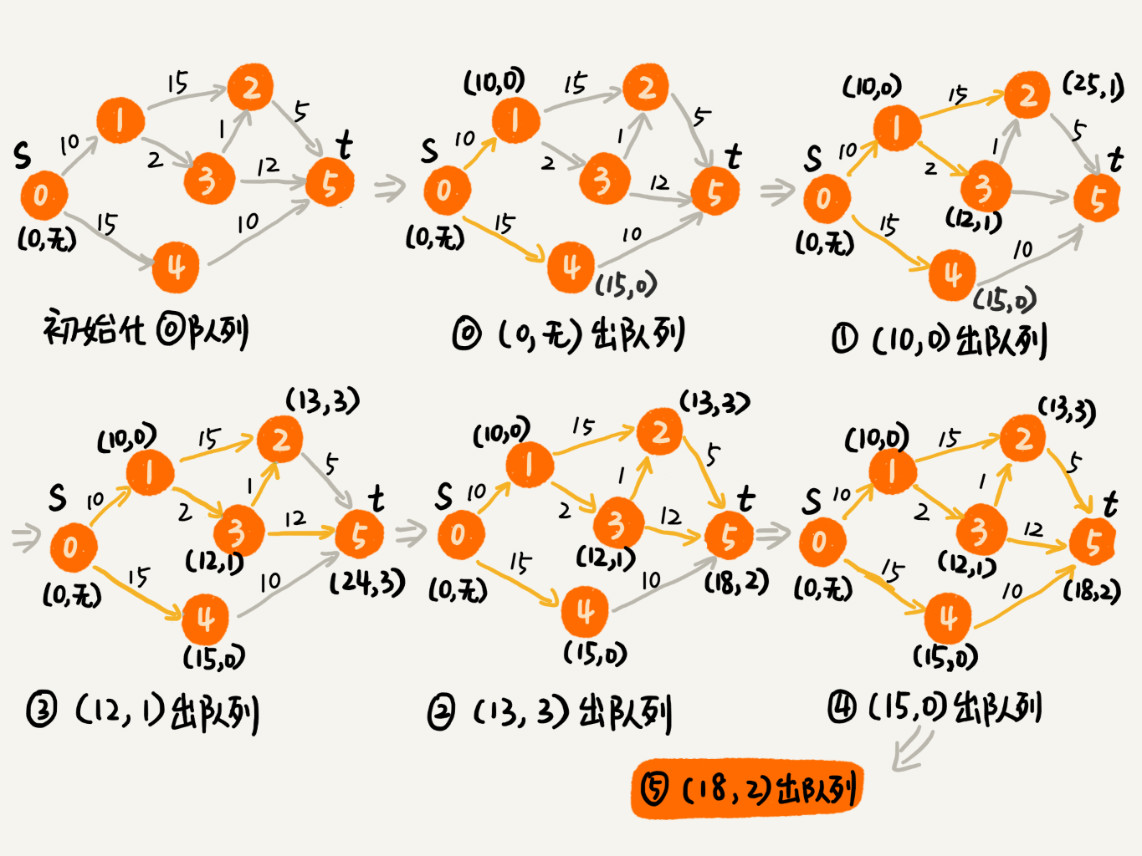
- 如果模拟节点出入队的过程会发现,存在同一节点重复入队的情况,但最终结果也是正确的,因为堆的特性保证了短路径一定会在长路径之前出队。算法终止的时候队列中会剩余重复入队元素,它们一定不是最短路,因此直接忽略,这就是所谓“延迟删除”(
lazy deletion)技术。延迟删除技术可以看作是一种实现技巧,也可以理解成无法修改元素优先级时一种无奈的折中选择。 - 由于允许重复元素入队,队列的大小可能会达到
E,因此基于优先队列+延迟删除技术的Dijkstra算法时间复杂度是O(E*logE)。如果是稀疏图的话,E ≤ V²意味着logE ≤ 2logV,因此算法的时间复杂度是O(E*logV),这也说明实践中使用优先队列解决稀疏图的最短路径问题的有效性。 - 个人感觉STL默认大顶堆的设计有点反人类,如果是小顶堆的话,
priority_queue与下文提到的set共用Vertex的<运算符即可,这样仅需写一个重载函数,而不需要定义两个完全不一样的比较函数。
# 2. set
set是STL自带的一种有序容器,基于红黑树实现,查找性能好,可以当作支持删除指定元素的优先队列使用。它要求元素支持比较,因此也需要实现比较函数。
auto comp2 = [](auto& lhs, auto& rhs) {
if (lhs.dist == rhs.dist) return lhs.id < rhs.id;
return lhs.dist < rhs.dist;
};
using PriorityQueue2 = std::set<Vertex, decltype(comp2)>;
//using PriorityQueue2 = std::set<Vertex>; // Vertex重载`<`运算符
2
3
4
5
6
7
注意
如果是自定义结构体要支持比较,需特别注意:set对于容器中元素的相等判定是!comp(a,b) && !comp(b,a)。比如这里不能只写一句return lhs.dist < rhs.dist就完事,这样dist相同id不同的节点是不会入队的。
算法实现
void dijkstraWithSTLSet(int s, int t) {
vector<int> predecessor(v_num);
dist.clear();
dist.resize(v_num, INF);
dist[s] = 0;
PriorityQueue2 q(comp2);
q.emplace(s, 0);
while (!q.empty()) {
auto curr = *q.begin(); // 当前最短路径出队并删除
q.erase(q.begin());
if (curr.id == t) { break; } // 最短路径!
for (auto& e : adj[curr.id]) {
if (curr.dist + e.w < dist[e.tid]) {
predecessor[e.tid] = curr.id; // 记录前驱节点
dist[e.tid] = curr.dist + e.w;
for (auto iter = q.begin(); iter != q.end(); ++iter) {
if (iter->id == e.tid) { // 如果在队列中则删除旧值
q.erase(iter);
break;
}
}
q.emplace(e.tid, dist[e.tid]); // 新值入队
}
}
}
print_path(s, t, predecessor);
print_dist(s, t, dist);
cout << "set队列中剩余元素: " << q.size() << endl;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
算法分析
- 可以看到,将
set当作优先队列使用可以避免元素重复入队,使得队列中元素个数不会超过V。 - 红黑树插入、删除、查找的时间复杂度都是
O(logn),然而这里是无法用find函数以O(logV)的复杂度查询到对应元素的(还记得上文中提到的set是怎么判定相等元素的吗?)。好在set提供了迭代器遍历,使我们能以O(V)的复杂度查询元素,然后以O(logV)的复杂度删除它。综合下来,整个算法的时间复杂度是O(E*(V+logV)) = O(E*V),反而上升了,有点舍近求远的感觉。 - 为了避免每次查询都耗费
O(V)的时间复杂度,我们可以引入一个visited[]布尔数组提速,下文会用到。
# 3. 自定义优先队列
自己实现一个支持更新指定元素的小顶堆,其中add和poll操作时间复杂度是O(logn),update操作的时间复杂度是O(n)(O(n)的时间查找+O(logn)的时间调整堆)。
class PriorityQueue3 {
public:
PriorityQueue3(int c) : capacity(c), count(0) {
nodes.resize(capacity + 1);
}
void add(Vertex&& data) {
if (count >= capacity) return;
++count;
nodes[count] = data;
heapify_float(count);
}
Vertex poll() {
if (count == 0) return {};
Vertex top = nodes[1];
nodes[1] = nodes[count];
--count;
heapify_sink(1);
return top;
}
void update(Vertex&& data) {
int i = 1;
for (; i <= count; ++i) {
if (nodes[i].id == data.id) { break; }
}
if (nodes[i].dist > data.dist) {
nodes[i].dist = data.dist;
heapify_float(i); // 小的上浮
}
else {
nodes[i].dist = data.dist;
heapify_sink(i); // 大的下沉
}
}
bool empty() const { return count == 0; }
int size() const { return count; }
private:
// 自下往上建堆,小的上浮
void heapify_float(int i) {
while (i / 2 > 0 && nodes[i].dist < nodes[i / 2].dist) {
std::swap(nodes[i], nodes[i / 2]);
i /= 2;
}
}
// 自上往下堆化,大的下沉
void heapify_sink(int i) {
while (true) {
int min_pos = i;
if (i * 2 <= count && nodes[i * 2].dist < nodes[min_pos].dist) min_pos = i * 2;
if (i * 2 + 1 <= count && nodes[i * 2 + 1].dist < nodes[min_pos].dist) min_pos = i * 2 + 1;
if (min_pos == i) break;
std::swap(nodes[min_pos], nodes[i]);
i = min_pos;
}
}
private:
std::vector<Vertex> nodes;
int capacity;
int count;
};
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
算法实现
void dijkstraWithCusQueue(int s, int t) {
vector<int> predecessor(v_num);
dist.clear();
dist.resize(v_num, INF);
dist[s] = 0;
PriorityQueue3 q(v_num);
q.add({ s, 0 });
vector<bool> visited(v_num, false);
visited[s] = true; // 标记是否在队列中
while (!q.empty()) {
auto curr = q.poll();
if (curr.id == t) { break; } // 最短路径!
for (auto& e : adj[curr.id]) {
if (dist[curr.id] + e.w < dist[e.tid]) {
predecessor[e.tid] = curr.id;
dist[e.tid] = dist[curr.id] + e.w;
if (visited[e.tid]) {
q.update({ e.tid, dist[e.tid] }); // 如果在队列中则更新dist值
}
else {
q.add({ e.tid, dist[e.tid] });
visited[e.tid] = true;
}
}
}
}
print_path(s, t, predecessor);
print_dist(s, t, dist);
cout << "自定义优先队列中剩余元素: " << q.size() << endl;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
算法分析
- 自定义优先队列有点像是结合了
priority_queue和set两种方法,它是基于堆实现的,但由于update操作涉及查询,时间复杂度降为O(V)。 - 为了避免无用的查询耗时,引入
visited[]布尔数组标记元素是否在队列中。只有当元素在队列中时才会触发update查询,否则元素直接入队即可;另外只有dist小的元素才会更新,因此update调整堆时只会执行heapify_float操作。 - 最好时间复杂度是
O(E*logV),最差是O(E*V),不妨写作O(E*(αV+βlogV)), α+β=1,其中α和β表示update和add操作的概率(其实是我不会分析了,留个坑,不填 ¯\(ツ)/¯ 。。。)。相关文章中作者直接把这种写法时间复杂度记为O(E*logV),我觉得也没啥问题。
# 4. 小结
实验结果如下图所示:
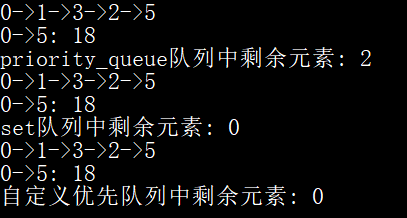
非优化版本的Dijkstra算法时间复杂度是
O(V²);优先队列+延迟删除的时间复杂度是
O(E*logE),对于稀疏图是O(E*logV),队列大小是边的数目E;自定义支持更新的优先队列,算法的时间复杂度是
O(E*logV),队列大小是节点数目V;直接使用STL自带的
priority_queue是最方便的做法,也是首选方案;专门为dijkstra算法设计的
斐波那契堆是理论上最快的;红黑树和堆的性能差距,暂时留坑,请参考CSDN | 红黑树 vs 最小堆 (opens new window)。
# [Github] 代码
项目实例均在vs2019上测试,并上传至GitHub (opens new window)。